AWARD YEAR
2023
CATEGORY
Body
GOALS
Good Health & Well-being
KEYWORDS
Robotic technology, prosthetics, Adaptive, Terrain, bionics
COUNTRY
United States of America
DESIGNED BY
Roman Stolyarov
WEBSITE
https://www.media.mit.edu/posts/adaptive-robotic-prostheses/
Adaptive Robotic Prostheses
A terrain-adaptive control system for robotic leg prostheses.
How does it work?
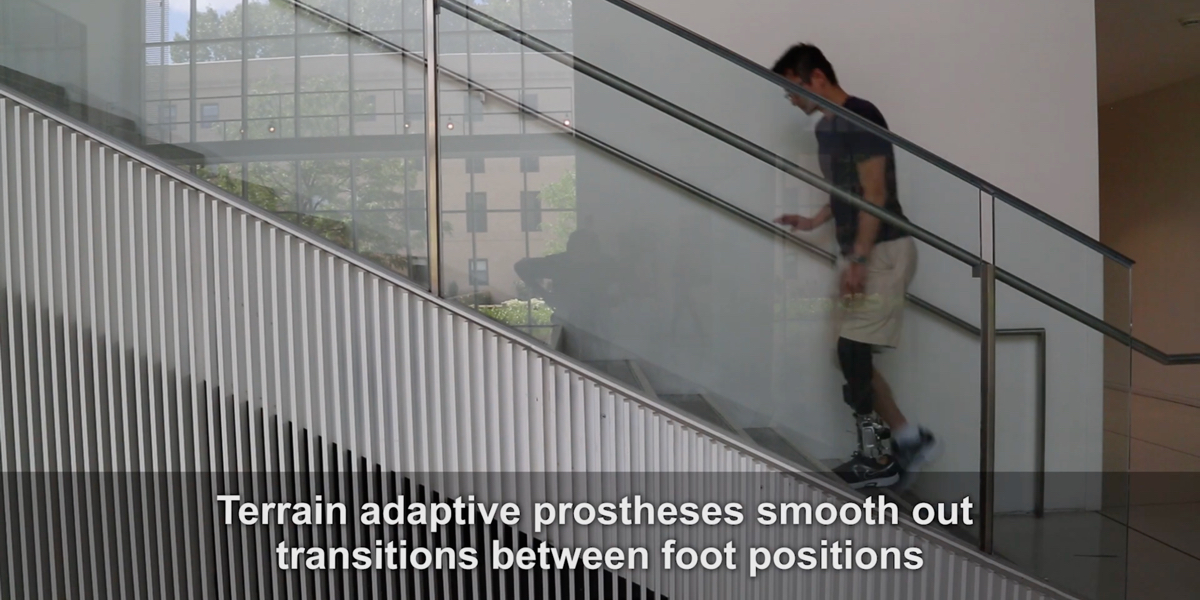
Roman Stolyarov developed a way to control a robotic prosthesis such that it allows the user to walk more naturally across different ground terrains. Besides increasing mobility and comfort, this control system also makes walking more symmetrical, decreases the risk of falling, and diminishes impacts on biological joints. In turn, this decreases the risk of chronic back pain and joint osteoarthritis, conditions which affect many people with leg amputations.
As Users walked with Adaptive Robotic Prostheses, Stolyarov would tune the device’s software to adapt to the ground terrain in much the same way that biological limbs do. Their robotic prostheses are capable of a range of reactions, like pushing the user’s leg off the ground at just the right time during walking or pointing the toe when they descend a flight of stairs.
Why is it needed?
While modern prostheses allow people with leg amputations to get around, the way that they get around is often tiring, uncomfortable, and burdensome on their intact joints. In the worst case, irregular terrain geometries—from uneven sidewalks to rugged hiking trails—can be difficult or impossible to navigate with conventional prostheses, burdening the user’s mobility, independence, and sense of being able-bodied. Adaptive Robotic Prostheses was intended to help people with amputations feel as able-bodied and mobile as possible, by allowing them to walk seamlessly regardless of the ground terrain.
How does it improve life?
The use of Adaptive Robotic Prostheses resulted in a control system that is simpler, more intuitive, and more adaptable to the gait of a given individual. This allows the system to adapt quickly to different terrain geometries, and makes troubleshooting when misclassifications occur relatively straightforward. Additionally, because the user can more easily comprehend the way the system works, they are much more likely to attain consistent, reliable performance.